


轴与卡迪尔坐标系息息相关。三轴机器人也被称为直角坐标或者笛卡尔机器人,它的三个轴可以允许机器人沿三个轴的方向进行运动;而六轴机器人中的六轴,就是笛卡尔坐标系中的X Y Z轴,及绕X Y Z轴旋转的U V W轴。
把各轴的运动路线 说明。
1.三轴
可以捡起 个物体,抬起它,它的水平和垂直移动,并将其设置或呈现触手可及的机器人在X,Y,Z空间的任何地方在不改变对象的方向
2.四轴
可以拿起 个对象,将其提起,水平移动,并将其设置或呈现 在X,Y,Z空间改变对象的方向沿 轴(例如偏航)
3.五轴
可以拿起 个对象,将其提起,水平移动,并将其设置在X,Y,Z空间 改变对象的方向沿两个轴(偏航和变桨)
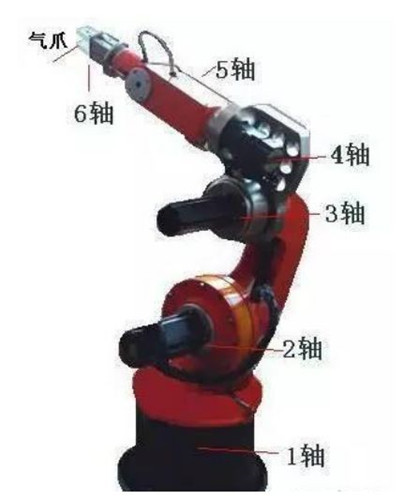
4.六轴
可以拿起 个对象,将其提起,水平移动,并将其设置在X,Y,Z空间 改变对象的方向沿三个轴(偏航,俯仰和横滚)。
5.七轴
所有的六轴机器人的运动能力,随着能力的线性方向(通常为水平运动,从 个地方到另 个移动机器人沿着轨道)。
四轴机器人
四轴是为了高速取放作业而设计的,那么多两个轴的六轴,则是有了更高的灵活性。
小型装配机械手中,“四轴机械手”是指“选择性装配关节机器臂”,即四轴机械手的手臂部分可以在 个几何平面内自由移动。四轴机械手的前两个关节可以在水平面上左右自由旋转的, 三个关节由 个称为羽毛(quill)的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。
这种独特的设计使四轴机械手具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴机械手擅长高速取放和其他材料处理任务。

六轴机器人
六轴机器人比四轴机器人多两个关节,因此有更多的“行动自由度”。
六轴机器人的 个关节能像四轴机器人 样在水平面自由旋转,后两个关节能在垂直平面移动。此外,六轴机器人有 个“手臂”,两个“腕”关节,使它具有类似人类的手臂和手腕能力。
六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部件,以特殊的角度放入包装产品里。执行许多由熟练工人才能完成的操作。而且可以节省人力开支,对于刚刚创立不久的企业来说,是很好的选择。